TODAY’S PATENT – ROBOT ARM
Robot Arm invented by Sami Haddadin pertains to an improved robot arm configuration designed for enhanced offline programming in human-robot interactions. It was published on 18-10-2018 and the application was granted patent in October 2021, it is currently assigned to Kastanienbaum GmbH. Patent has been granted by the European Patent Office and is also active in Japan, Korea, China and Denmark. The robot arm comprises N arm components that can be connected to a robot body via N actuator-driven joint connections (GVn) (Where n= 1,2….N).
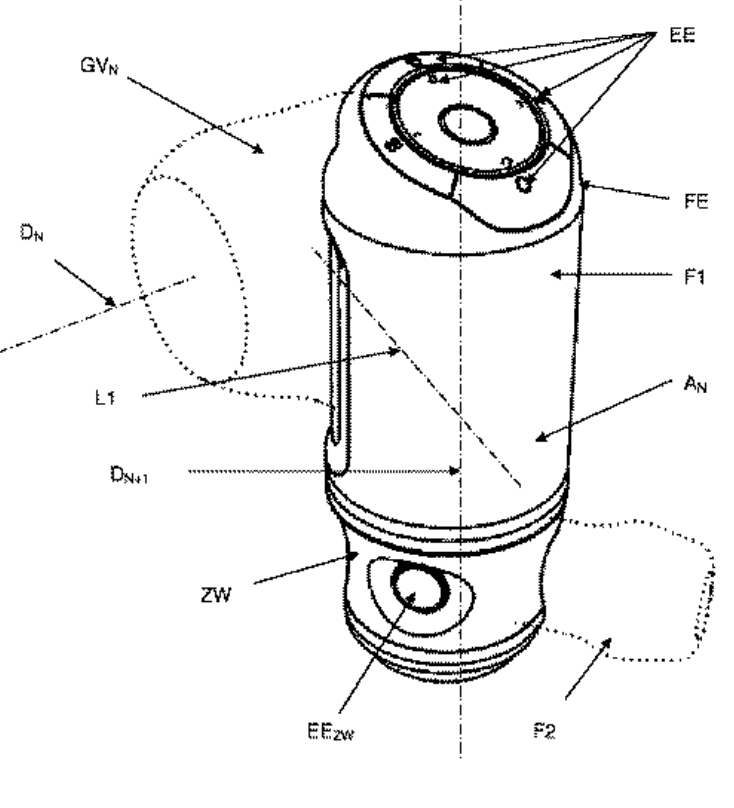
This system enables teaching robot movements offline by manually guiding the arm while compensating for its inertia. To achieve more precise and sensitive offline programming, the robot arm is equipped with unique features. The most distinctive aspect of the invention is the presence of a protrusion attached to the end effector or an intermediate component of the robot arm. This protrusion extends perpendicularly to a rotational axis and is rigidly connected to allow gripping by an operator’s hand.
Additionally, the arm component has a concentrically aligned grip-like protrusion that holds input elements for manual data input. These input elements are strategically positioned to be comfortably operated by a thumb. Moreover, an output unit for displaying graphical or alphanumeric information is situated on the arm component, and the robot can also connect to a smartphone for information output.
The combination of the gripping protrusions and well-placed input elements allows operators to intuitively guide the robot arm and input commands, resulting in improved programming accuracy. The invention also encompasses a robot equipped with this arm, providing sensors to detect mechanical arm states, units to capture operator inputs, and an evaluation system to convert these inputs into control instructions for the robot’s movement.


 +1 888 890 6411
+1 888 890 6411